Роботи стають все більш досконалими у сфері зору та руху, проте тактильні відчуття залишаються одним із їхніх головних недоліків. Тепер дослідники розробили мініатюрний тактильний датчик, який може дати роботам щось набагато ближче до людського дотику.
Технологія, розроблена дослідниками з Кембридзького університету, заснована на композитах із рідких металів та графені – двовимірній формі вуглецю. Ця «шкіра» дозволяє роботам визначати не тільки силу натискання на об'єкт, а й напрямок прикладених сил, ковзання об'єкта і навіть шорсткість поверхні, в масштабі, досить малому, щоб конкурувати з просторовим дозволом людських пальців. Результати їх досліджень опубліковані у журналі Nature Materials.
Людські пальці покладаються на безліч типів механорецепторів для одночасного сприйняття тиску, сили, вібрації та текстури. Відтворення такого рівня багатовимірного тактильного сприйняття у штучних системах є серйозною проблемою, особливо у пристроях, які одночасно досить малі та міцні для практичного використання.
"Більшість теперішніх тактильних датчиків або надто громіздкі, або надто крихкі, або надто складні у виготовленні, або не здатні точно розрізняти нормальні та тангенційні сили", — сказав професор Тауфік Хасан із Кембридзького центру графена, який очолював дослідження. "Це є серйозною перешкодою на шляху до справді спритних маніпуляцій роботів".
Для подолання цього дослідницька група розробила м'який, гнучкий композитний матеріал, що поєднує в собі графенові листи, металеві мікрокраплі, що деформуються, і частинки нікелю, впроваджені в силіконову матрицю.
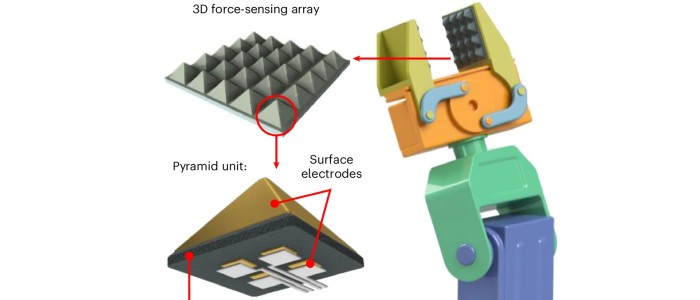
Натхненні мікроструктурами людської шкіри, дослідники надали матеріалу форму крихітних пірамід, деякі з яких досягають 200 мікрометрів у поперечнику. Ці пірамідальні структури концентрують напругу на своїх вершинах, дозволяючи датчику виявляти надзвичайно малі сили, зберігаючи при цьому широкий діапазон вимірювань.
В результаті вийшов тактильний датчик, досить чутливий для виявлення піщинки. У порівнянні з наявними гнучкими тактильними датчиками, новий пристрій покращує розміри та межі виявлення приблизно на порядок.
Датчик також здатний розрізняти сили зсуву та нормальний тиск, що дозволяє йому виявляти початок ковзання об'єкта. Вимірюючи сигнали з чотирьох електродів під кожною пірамідою, датчик може математично відновлювати повний тривимірний вектор сили реального часу.
У ході демонстрацій команда інтегрувала датчики у роботизовані захвати. Роботи змогли захоплювати тендітні об'єкти, такі як тонкі паперові трубки, не роздавлюючи їх. На відміну від звичайних датчиків сили, які покладаються на попередню інформацію про властивості об'єкта, нова система адаптується в реальному часі шляхом виявлення ковзання.
На ще менших масштабах масиви мікросенсорів можуть визначати масу, геометрію та щільність матеріалу крихітних металевих сфер, аналізуючи величину та напрямок сили. Це відкриває можливості для застосування в малоінвазивній хірургії або мікроробототехніці, де звичайні датчики занадто великі.
Крім робототехніки, ця технологія може мати значні наслідки у протезуванні. Удосконалені штучні кінцівки дедалі частіше використовують тактильний зворотний зв'язок, щоб забезпечити користувачам відчуття дотику. Високочутливі мініатюрні 3D-датчики сили можуть забезпечити більш природну взаємодію з об'єктами, покращуючи контроль, безпеку та впевненість користувача.
"Наш підхід показує, що для досягнення високоточного 3D-тактильного сприйняття не потрібні громіздкі механічні конструкції або складна оптика", - сказав провідний автор, доктор Гуолінь Юнь, колишній стипендіат програми Ньютона Королівського товариства в Кембриджі, а нині професор Китайського університету науки та технологій. "Поєднуючи інтелектуальні матеріали зі структурами, натхненими шкірою, ми досягаємо характеристик, які напрочуд близькі до людського дотику".
У перспективі дослідники вважають, що датчики можна буде ще більше зменшити, потенційно до розмірів менше ніж 50 мікрометрів, наближаючи їх до щільності механорецепторів у людській шкірі. У майбутніх версіях також можуть бути інтегровані датчики температури та вологості, що наблизить їх до повністю мультимодальної штучної шкіри.
У міру того, як роботи все частіше залишають контрольовані заводські умови й проникають у будинки, лікарні та непередбачувані умови реального світу, подібні досягнення в області тактильних відчуттів можуть зробити революцію, дозволивши машинам не просто бачити й діяти, а й по-справжньому відчувати.



